Петр Силин - Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная

- Название:Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:9785449840837
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Петр Силин - Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная краткое содержание
Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
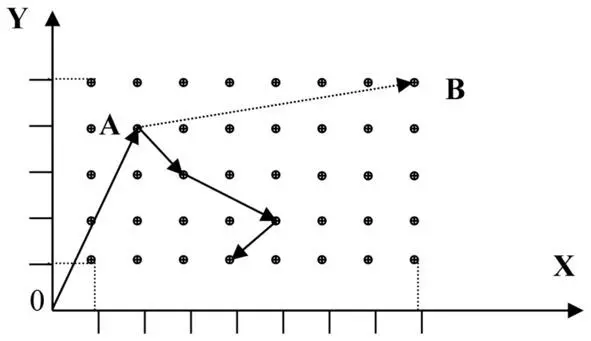
Рисунок 14 Движение с использованием ресурсов
— принципиальная однонаправленность генезиса систем, которая состоит в том, что системе в принципе запрещено возвращаться в исходное или предыдущее состояние, равно как и принимать определенные состояния путем выработки или установления наборов правил или запретов, хотя теоретически и технически, исходя из интервалов значений параметров, объект мог бы принять табуированное состояние. Наиболее яркими примерами могут служить либо движение пешки по доске (пешка не может, как известно, возвращаться), либо система запретов в обществе, либо старение людей.
– организация объекта такова, что пространство состояний содержит не все принципиально возможные состояния, исходя из интервалов значений параметров самого объекта. Эту ситуацию легче проиллюстрировать, что и сделано на рисунках 15.1 и 15.2:
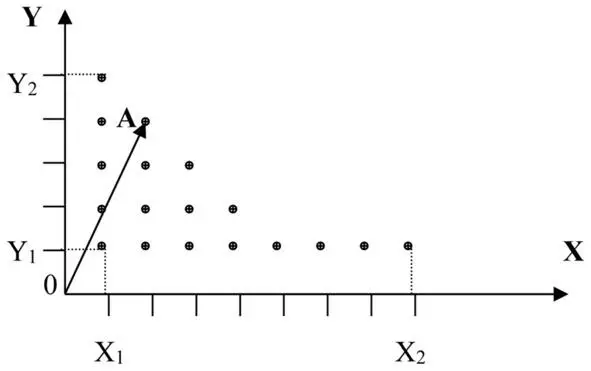
Рисунок 15.1 Пространство состояний – треугольник
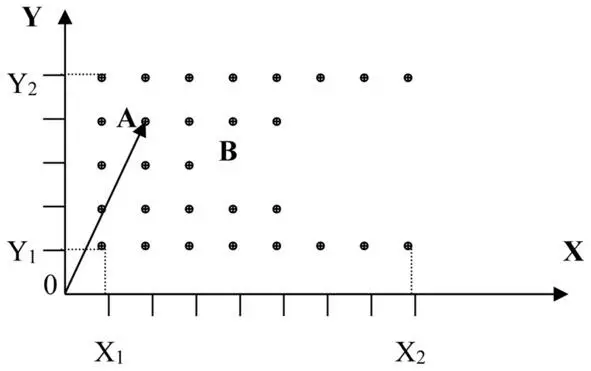
Рисунок 15.2 Пространство состояний – рукава
Как видно из представленных рисунков, если в пространстве состояний присутствуют вычеты, то в таком контенте объект не сможет принимать все теоретически доступные состояния.
Кроме того, рисунок 15.2. иллюстрирует вариант вырождения пространства – после того как объект пройдет точку B , являющуюся точкой разветвления, и попадет в один из рукавов (при условии их сужения), то каждое движение по рукаву будет оставлять объекту все меньше вариантов дальнейшего продвижения.
Следует отметить, что примеры на рисунках 15 не исчерпывают все возможные варианты пространств состояний с исключениями.
1.6.3. Замечание.
В качестве замечания к вопросам об особом поведении объектов следует отметить, что в реальных системах могут иметь место все рассмотренные в данном разделе факторы, затрудняющие существование систем.
Более того, автор не исключает возможности того, что в данном разделе приведены не все источники и факторы, которые могут приводить к ухудшению генезиса объектов.
1.7. Инерционность объектов. Движение объектов
1.7.1. Инерционность объектов.
Все реальные объекты обладают таким свойством как инерционность.
Инерционность проявляется в том, что старт перехода в другое состояние и равно завершение перехода в требуемое или целевое состояние из предшествующего происходит не мгновенно, а требует конечного времени.
В случае, когда объект совершает то или иное движение, при изменении воздействия инерционность проявляется в задержке начала изменения направления вектора и/или модуля вектора движения, а в случае нахождения объекта в состоянии покоя до появления воздействия инерционность проявляется в задержке начала движения объекта в диктуемом направлении. Оба случая позволяют говорить о статической составляющей инерционности объектов.
Статическая составляющая инерционности объектов аналогична массе покоя в элементарной физике.
Динамическая составляющая инерционности проявляется в конечности ускорения движения при наличии постоянного воздействия на объект (смотри выражение 13).
Это приводит к появлению либо зон разгона и торможения, либо конечных времен разгона и торможения.
Вне зависимости от генезиса объектов инерционность проявляется всегда, но сложность строения объектов оказывает влияние на характер инерционных процессов.
Простейшие пассивные объекты, у которых отсутствует система управления, проявляют естественную инерционность по параметрам, которая определяется тем, что при наличии целевого вектора (внешнего воздействия) требуется некоторое время для того, чтобы такое количество компонентов объекта приобрело целевой вектор (или такое количество элементов объекта в случае однородных систем) и начало движение в направлении цели, которого будет достаточно для того, чтобы началось перемещение объекта в требуемом направлении как единого целого в соответствующем пространстве состояний.
В случае необходимости совершить торможение, под инерционностью будет пониматься время, которое необходимо для того, чтобы достаточное количество элементов или компонентов объектов приобрели вектор торможения, обеспечивающее (имеется в виду количество) начало торможения объекта как единого целого.
В реальных условиях воздействие не производится на все компоненты или элементы объекта одновременно (синхронно, синфазно), первоначально воздействие производится на ряд элементов, наиболее по структуре своих параметров соответствующих структуре параметров воздействия или специально (или по воле случая) являющихся приемниками воздействия.
К тому же величина и направленность воздействия на различные элементы или компоненты объекта могут быть различны.
Передача воздействия на остальные элементы осуществляется посредством внутренних связей (воздействие передается по графу связей). Такая передача занимает некоторое время ввиду задержки сигнала внутри промежуточных элементов и задержки сигнала на стыках элементов.
Эти задержки и обуславливают инерционные свойства объектов.
Следует отметить, что структура объекта (его граф) может быть образована с использованием как жестких структурных связей, так и одновременно с применением слабых связей.
В случае объектов, организованных посредством жестких структурных связей (это объекты, в которых параметры, по которым образуются связи между элементами, имеют одинаковые значения в точках соединения элементов, при этом синхронно и синфазно изменяющиеся в одних и тех же интервалах значений), передача воздействия по графу испытывает задержки только внутри составных элементов объекта.
В случае объектов, организованных посредством слабых связей (параметры элементов, образующих объект, в точках соединения этих элементов имеют значения, которые могут изменяться не синхронно и не синфазно), передача воздействия задерживается не только внутри самих элементов, но и на стыках между ними на время, необходимое для согласования значений контактных параметров. Инерционность таких систем выше, чем систем, образованных из тех же элементов того же количества, но соединенных жесткими связями. Примером таких систем могут служить либо объекты, образованные гибкими соединениями, либо системы, организованные посредством информационных потоков.
Читать дальшеИнтервал:
Закладка: