Петр Силин - Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная

- Название:Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:9785449840837
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Петр Силин - Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная краткое содержание
Некоторые аспекты оценки эффективности функционирования систем. Вторая редакция, исправленная и дополненная - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
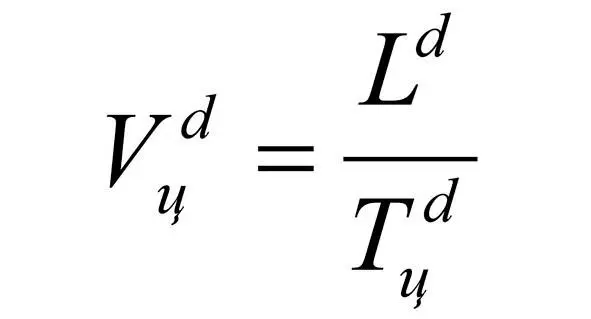
выражение 34
– текущая скорость V (t) определяется отношением дистанции, пройденной к настоящему моменту времени, к временному (ударение на предпоследний слог) интервалу Т , затраченному на прохождение этого участка и может быть выражено соотношением (35):
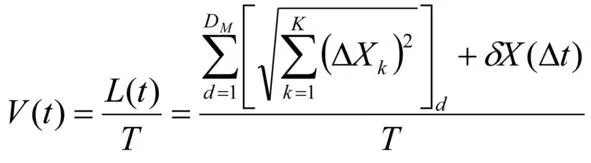
выражение 35
— эффективная скорость V зфф определяется как скорость, с которой должен двигаться объект, чтобы за оставшееся время достичь цели. Аналитическое выражение будет определено ниже по тексту.
В этом же разделе следует определить прогнозируемое время достижения цели, которое определяется как время, необходимое для преодоления остатка пути до цели, если бы субъект продолжал двигаться с текущей скоростью, что может быть представлено выражением (36):
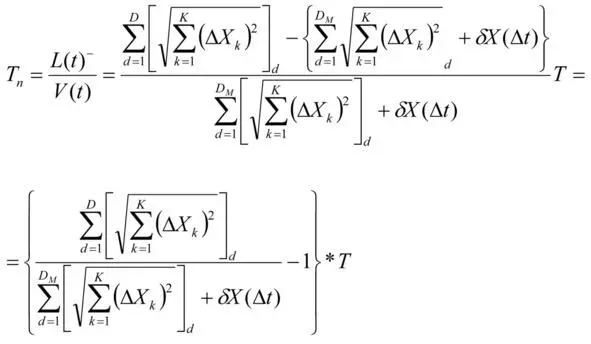
выражение 36
Сравнение прогнозируемого времени достижения цели и остаточного времени из отведенного на операцию (прохождение этапа) позволяет системе управления принимать квалифицированное решение об изменении графика движения.
1.7.3. Движение объектов и систем с учетом инерционности.
Представляется очевидным, что инерционность объектов, какого бы происхождения они не были, оказывает определенное влияние на характер движения, на прогнозируемость достижения результатов.
Прежде, чем приступить к разработке аналитических конструкций, следует, по мнению автора, рассмотреть движение инерционного объекта качественно.
При движении любого объекта (в том числе и субъекта, и сложных технических и общественных систем) в пространстве состояний, как указывалось, проявляются инерционные свойства, заключающиеся в том, что объект при воздействии (фиксации целевого состояния) любой этиологии (целевом или стохастическом) на него, как стороннем, так и со стороны собственной системы управления, не сразу изменяет вектор и величину скорости движения.
Это может приводить к следующим явлениям:
– если объект находился в покое, то начало движения оказывается отложенным, а достижение уровня скорости, требуемого для достижения цели (или промежуточной задачи) в заданное время происходит не скачкообразно, но постепенно. Постепенное наращивание скорости, в противовес скачкообразному, приводит к потере времени и возможному выходу из графика движения к цели;
– если же объект находился в движении, то после изменения как по модулю, так и по направлению управляющего (как стороннего, так и внутреннего, как стохастического, так и целевого) воздействия, начало реагирования (если реагирование вообще будет иметь место) на возникшее воздействие окажется отложенным на некоторое время, аналогичное запаздыванию на старте. В дальнейшем объект (в зависимости от характера воздействия, его позитивности или негативности влияния на график движения, в зависимости от своего происхождения и своей сложности) может начать постепенно изменять величину скорости движения;
— если внешнее воздействие или собственное управляющее воздействие ошибочно направлено в сторону от трассы, то объект некоторое время будет продолжать по инерции двигаться по трассе (даже при очень сильном воздействии). Естественно, если позволяет быстрота реакции, то за период инерционного движения по трассе он может успеть скомпенсировать ошибочное воздействие. Но, в общем случае, реагирование на ошибочное воздействие начнется опять-таки с некоторой задержкой, что приведет к постепенному (ускоренному) уходу объекта с запланированной траектории. Начавшееся реагирование состоит в замедлении движения либо до нулевого значения (для организации возврата на трассу в том или ином месте, который можно рассматривать как начало нового этапа движения с аналогичными задержками и постепенными выходами в график движения), либо до такого значения, что бы система управления смогла с ходу совершить маневр по возврату на траекторию в той или иной точке, либо для организации новой траектории движения;
— если уход с трассы является необходимым (например, при преследовании другого объекта), то просто объект после оказания воздействия будет двигаться некоторое время по трассе по инерции (что аналогично задержке на старте) с постепенным в дальнейшем сходом с траектории. Следует обратить внимание на том момент, что в этом случае изменяется не столько модуль скорости движения (хотя это не исключено), а изменяется вектор скорости движения. Изменение вектора скорости адекватно появлению дополнительного вектора скорости соответствующего направления и модуля;
— при необходимости совершить поворот в узловой точке может потребоваться подготовка и проведение маневра по изменению направления движения не в самой узловой точке, а заранее с тем, чтобы не выскочить за пределы трассы из-за инерции объекта. При подходе к месту совершения маневра может потребоваться произвести некоторое торможение с тем, чтобы система управления успела совершить маневр без покидания объектом запланированной траектории движения;
– при неудачном маневре в узловой точке может произойти выход объекта (субъекта) за пределы расчетной траектории (выход за пределы траектории, следует отметить, может произойти и под внешним воздействием, и в результате ошибки собственной системы управления), что может потребовать либо возврата на трассу (соответственно с дополнительными затратами времени и ресурсов), либо приведет к необходимости прокладывания нового курса из точки, в которой система управления сможет корректно перенацелить объект на достигаемую финишную точку данного этапа (либо вообще может произойти изменение цели). Точка коррекции определяется из того условия, чтобы система управления к моменту достижения объектом этой точки успевала рассчитать новую траекторию до финиша этапа, определить условия маневра (а они должны измениться, если изменяется траектория движения) на финише этапа, и должна успеть провести сам маневр в точке коррекции. Не исключено, что может потребоваться остановка в точке коррекции. После проведения маневра объект должен ускориться до такого значения скорости, чтобы не потерять времени на прохождение этапа (а если была остановка в точке коррекции, то еще добавляется задержка в начале движения) и двигаться к финишу этапа (естественно возможны неоднократные сходы с трассы до достижения финиша этапа);
Читать дальшеИнтервал:
Закладка: