Владимир Живетин - Введение в теорию риска (динамических систем)

- Название:Введение в теорию риска (динамических систем)
- Автор:
- Жанр:
- Издательство:Изд-во Института проблем риска, Информационно-издательский центр «Бон Анца»
- Год:2009
- Город:Москва
- ISBN:978-5-98664-052-5, 978-5-903140-63-3
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Живетин - Введение в теорию риска (динамических систем) краткое содержание
В работе вводятся первичные и вторичные показатель риска как для классических информационно-энергетических систем, так и для суперклассических – интеллектуально-энергетических систем.
Первичные показатели риска характеризуются множеством безопасных состояний, рассчитанных согласно, например, теории устойчивости; вторичные показатели риска представляют собой вероятности выхода динамической системы в область критических состояний с учетом свойств систем контроля и управления.
Полученные результаты позволяют осуществить математическое моделирование прогнозирования и управления рисками различных динамических систем, включая интеллектуально-энергетические.
Введение в теорию риска (динамических систем) - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Если Р 3и Р 2удовлетворяют допустимым или нормативным значениям Р доп , то система способна выполнять поставленную перед ней цель. Если, например, Р 3> Р 3 доп , то необходимо принимать решение об изменении, в том числе уменьшении границ пороговых значений x n .
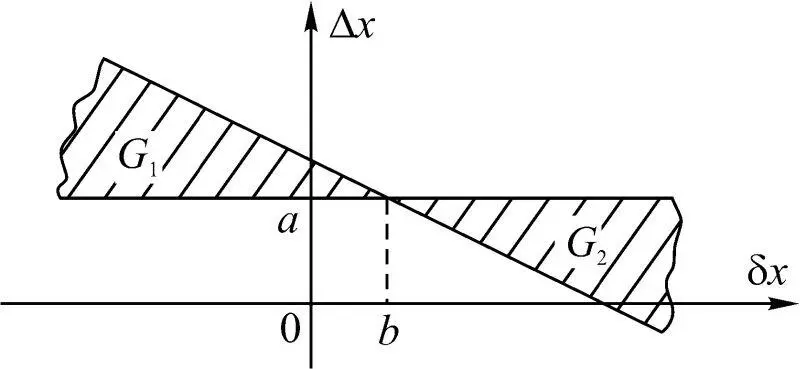
Рис. 1.49

Рис. 1.50
Выводы
Полученные вероятностные показатели рисков и безопасности динамических систем могут быть применены в практической деятельности человека, если мы сможем установить области допустимых состояний изучаемой динамической системы и построить плотности вероятности случайных процессов, подлежащих контролю и ограничению.
Проблемы решения обусловлены:
1) принадлежностью любой динамической системы к иерархии динамических систем бытия, что обусловливает особенности анализа;
2) тем, что в общем случае динамическая система обладает структурно-функциональными свойствами, которые в процессе функционирования динамической системы подвержены как эволюции, так и инволюции;
3) наличием взаимосвязи динамических систем, направленных на достижение единой цели в общем случае на иерархическом уровне.
Теоретические основы оценки потерь и соответствующих рисков динамической системы связаны с разработкой математических моделей, направленных на нахождение методов и средств нейтрализации потерь, например путем построения областей допустимых состояний Ω доп и построения таких управлений, при которых динамический объект не покидает Ω доп .
При этом теория риска динамических систем посвящена подтверждению возможности или невозможности реализации и формирования динамическими системами таких процессов, когда достигается поставленная цель.
Теория риска включает в себя разработку:
1) теоретических основ расчета области допустимых Ω доп и критических Ω кр состояний с использованием:
– теории устойчивости;
– теории катастроф;
– численных методов и т. п. согласно структурно-функциональным свойствам динамической системы;
2) математических моделей объектов контроля и управления;
3) теоретических основ математических моделей погрешностей систем управления;
4) теоретических основ построения математических моделей погрешностей систем контроля;
5) теоретических основ анализа и синтеза систем контроля и управления;
6) математических основ построения численных показателей риска в пространстве случайных величин, процессов и полей;
7) метода расчета допустимых значений показателей риска и их корректировки путем изменения области допустимых состояний;
8) оценки возвратных и невозвратных критических состояний;
9) методов и средств полунатурального и натурального моделирования.
В общем случае теория риска с указанных позиций изучает объекты биосферы, этносферы, социосферы, техносферы, эгосферы в их взаимосвязи, взаимовлиянии. При изучении эгосферы имеют место проблемы взаимодействия потерь и рисков, возникающих на уровнях мегамира, макромира, микромира и тонкого мира. Это позволяет рассматривать проблемы риска человека как элемента биосферы и социосферы.
Построение показателей риска и безопасности управляемых динамических систем включает разработку:
1) математических моделей областей опасных и безопасных состояний динамической системы, т. е. Ω, кр и Ω доп соответственно;
2) модели изменения выходных параметров x ( t ) под воздействием внешних W ( t ) и внутренних V ( t ) возмущающих факторов риска, т. е. R = ( W, V );
3) модели вероятностных характеристик векторного процесса x ( t ), т. е. плотностей вероятностей W ( x, t ), как в текущий момент времени, так и в упрежденный;
4) модели процесса x ( t ) при переходе из Ω доп в Ω кр и наоборот:
– процедуры расчета допустимого времени пребывания динамической системы в области Ω кр ;
– разработка средств и методов вывода из области Ω кр .
Выход в Ω кр при различных факторах риска R порождают различные фазовые траектории, которым соответствуют различные допустимые временные интервалы τ 0выхода из Ω кр и различные характеристики движения х ( t ).
Глава II. Классические динамические системы. Опасные и безопасные состояния
В данной главе рассматриваются фрагменты теоретических основ построения областей опасных и безопасных состояний, необходимых для расчета вероятностей риска и безопасности Р = ( Р 1, Р 2, Р 3, Р 4) классических динамических систем, наделенных информационно-энергетическим потенциалом. Функциональные свойства подсистем структуры таких систем неизменны во времени и пространстве так же, как и целевые возможности системы в целом.
2.1. Классификация динамических систем. Вводные понятия
В качестве примеров, поясняющих суть дальнейших рассуждений, рассмотрим следующие системы.
1. Интеллектуальная система эгосферы управляет интеллектуальным потенциалом, ее деятельность направлена на изменение внутренних функциональных свойств подсистем единой системы – эгосферы.
2. Человек как динамическая система создает внутренние и внешние процессы в виде интеллектуальных и материальных объектов.
Введем следующие динамические системы на качественном уровне, положим в основу классификации такие рассмотренные в первой главе понятия, как функциональные свойства, структура, структурно-функциональные свойства.
Функциональные динамические системы – это такие системы, деятельность которых направлена на самосовершенствование – эволюционное развитие своего внутреннего потенциала [42].
Структурные или классические динамические системы наделены неизменными целевыми функциями при неизменных функциональных свойствах подсистем структуры, реализующих заданные цели [36].
Структурно-функциональные или суперклассические динамические системы реализуют комплексную деятельность, в процессе которой реализуется функциональное саморазвитие подсистем структуры, а также развитие динамических систем иерархии.
Введенные динамические системы, обладая различными потенциалами, реализуют различные уровни целедостижения.
Функциональные динамические системы, например эгосфера [26], осуществляют саморазвитие посредством энергетического потенциала, создаваемого системой, преобразуя энергию внешней среды.
Читать дальшеИнтервал:
Закладка: