Владимир Живетин - Введение в теорию риска (динамических систем)

- Название:Введение в теорию риска (динамических систем)
- Автор:
- Жанр:
- Издательство:Изд-во Института проблем риска, Информационно-издательский центр «Бон Анца»
- Год:2009
- Город:Москва
- ISBN:978-5-98664-052-5, 978-5-903140-63-3
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Живетин - Введение в теорию риска (динамических систем) краткое содержание
В работе вводятся первичные и вторичные показатель риска как для классических информационно-энергетических систем, так и для суперклассических – интеллектуально-энергетических систем.
Первичные показатели риска характеризуются множеством безопасных состояний, рассчитанных согласно, например, теории устойчивости; вторичные показатели риска представляют собой вероятности выхода динамической системы в область критических состояний с учетом свойств систем контроля и управления.
Полученные результаты позволяют осуществить математическое моделирование прогнозирования и управления рисками различных динамических систем, включая интеллектуально-энергетические.
Введение в теорию риска (динамических систем) - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
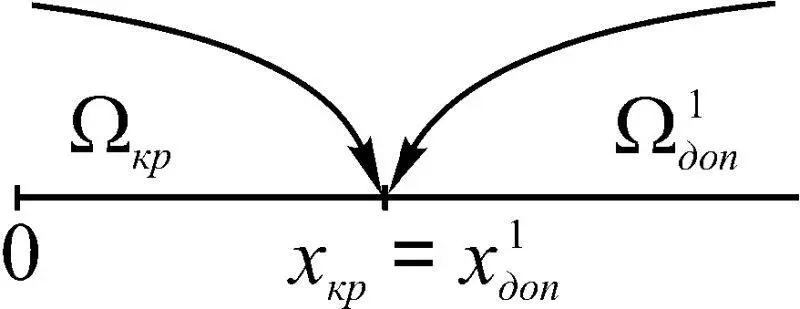
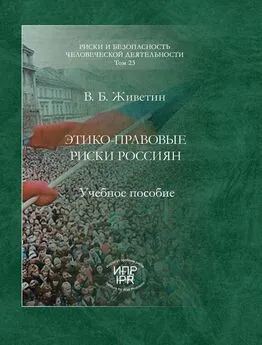
Рис. 1.29
2. Системе контроля присущи ошибки вычисления х доп .
Система контроля вычисляет х доп с ошибкой δ х доп . При этом множество Ω 1 доп уменьшают на некоторую величину Δ 1, которую называют запасом (рис. 1.30).
С помощью Δ 1компенсируются потери, обусловленные погрешностями δ х доп как факторами риска. При этом х 2 доп > х 1 доп .
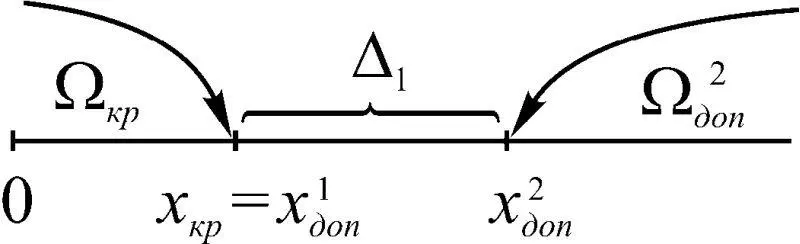
Рис. 1.30
3. Измеренное значение х изм индикатора х и его фактическое значение х ф отличаются на величину δ х – погрешность измерения, которая отлична от нуля. При этом с целью компенсации потерь, обусловленных δ х , вводят новое множество Ω o доп , которое называется областью допустимых значений х , полученных при измерении или оценке, и соответствующий запас Δ 2= х 3 доп – х кр (рис. 1.31).
4. В некоторых случаях динамика процесса  = dx / dt такова, что ею нельзя пренебрегать в силу свойств системы управления (ее инерционных характеристик). Тогда вводят запас Δ 3= х 4 доп – х кр (рис. 1.32) для компенсации потерь, обусловленных в том числе динамикой процессов.
= dx / dt такова, что ею нельзя пренебрегать в силу свойств системы управления (ее инерционных характеристик). Тогда вводят запас Δ 3= х 4 доп – х кр (рис. 1.32) для компенсации потерь, обусловленных в том числе динамикой процессов.
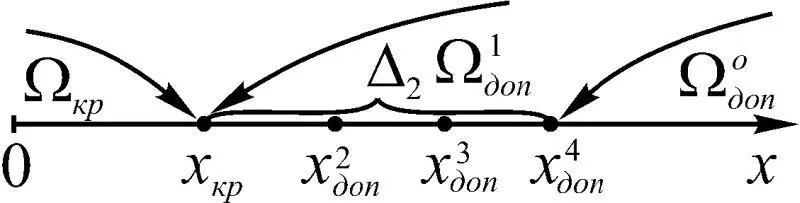
Рис 1.31
Случай двусторонних ограничений, накладываемых на х ( t ), представлен на рис. 1.33.
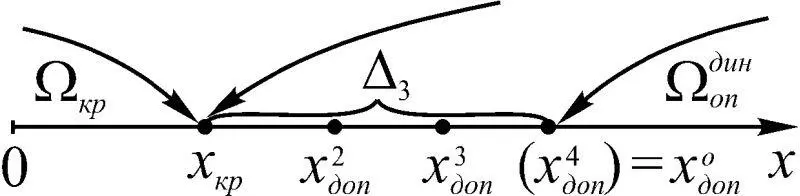
Рис. 1.32
Граничные элементы множества (Ω) э обозначим ( х н ) доп и ( х в ) доп , где ( х н ) доп < ( х в ) доп , т. е. Ω э – это область допустимых состояний, когда отсутствуют динамика системы и погрешности контроля, т. е. область допустимых состояний, например, из условий устойчивости. При этом имеем
x н доп = x н кр + Δ н ; x в доп = x в кр – Δ в ,
где x н кр , x в кр – соответственно нижнее (минимальное) и верхнее (максимальное) критические значения индикатора; x н доп , x в доп – соответственно нижнее (минимальное) и верхнее (максимальное) допустимые значения контролируемого и ограничиваемого индикатора; Δ н , Δ в – соответственно нижняя и верхняя величины гарантийного запаса для индикатора, вводимые на случай непреднамеренного выхода x за допустимые значения при неблагоприятном сочетании возмущающих факторов, в том числе из-за ошибок измерения. При этом критические значения, как правило, определяются для установившегося режима функционирования социально-экономической системы, когда компоненты вектора состояния x постоянны или изменяются пренебрежимо мало.

Рис. 1.33
Задача построения множества допустимых состояний для нестационарной социально-экономической системы более сложна и в настоящее время еще не получила окончательного решения. В отличие от установившегося движения здесь необходимо рассматривать также скорость изменения ограничиваемого параметра системы.
Введем множество (Ω) дин доп допустимых значений x в неустановившемся режиме:
(Ω) дин доп = { x : ( x н ) дин доп ≤ x ≤ ( x в ) дин доп },
где ( x н ) дин доп = φ н ( x н доп ,  ); ( x в ) дин доп = φ в ( x в доп , ); φ н , φ в – неизвестные функции, подлежащие определению;
); ( x в ) дин доп = φ в ( x в доп , ); φ н , φ в – неизвестные функции, подлежащие определению;  .
.
Рассмотрим множество (Ω) к доп , заданное с учетом погрешностей системы контроля. Информационно-измерительная система обладает погрешностями δ( t ), в результате в простейшем случае на ее выходе имеем ( x ) изм = ( x ) ф + δ. Погрешности измерения δ = δ( t ) обусловливают необходимость введения допустимых x к доп , индицируемых на выходе системы контроля, значений контролируемого и ограничиваемого параметра x ( t ), т. е. дополнительного запаса.
Множество (Ω) к доп допустимых в процессе контроля (оценки) значений x ( t ) определим следующим образом:
(Ω) к доп = { x : ( x н ) к доп < x < ( x в ) к доп },
где ( x н ) к доп , ( x в ) к доп – соответственно нижнее и верхнее допустимые при контроле значения x ( t ) (рис. 1.33). В частном случае
( x в ) к доп = ( x в ) доп – Q в ; ( x н ) к доп = ( x н ) доп + Q н ,
где Q в, Q н– соответственно верхний и нижний запасы, обусловленные погрешностями измерения и подлежащие определению в процессе анализа риска.
В общем случае величины ( x ) к доп  (Ω) к доп являются функциями ряда параметров и имеют вид
(Ω) к доп являются функциями ряда параметров и имеют вид
( x ) к доп = f ( x 1, …, x n , ( x 1) доп , …, ( x n ) доп , ( x 1) кр , …, ( x n ) кр , k i , σ 2, t ),
где k i– параметр системы контроля, подлежащий определению при проектировании  ; σ 2 – дисперсия погрешностей функционирования информационно-измерительной системы; f – функции, описывающие закон изменения области Ω к доп ( x к доп ).
; σ 2 – дисперсия погрешностей функционирования информационно-измерительной системы; f – функции, описывающие закон изменения области Ω к доп ( x к доп ).
На рис. 1.34 приведены графические представления указанных выше множеств для двумерного вектора состояния в стационарном случае. На данном рисунке обозначено: Ω доп = Ω э ; (Ω 2) доп = (Ω 2) э ; (Ω 1) доп = (Ω 1) э .
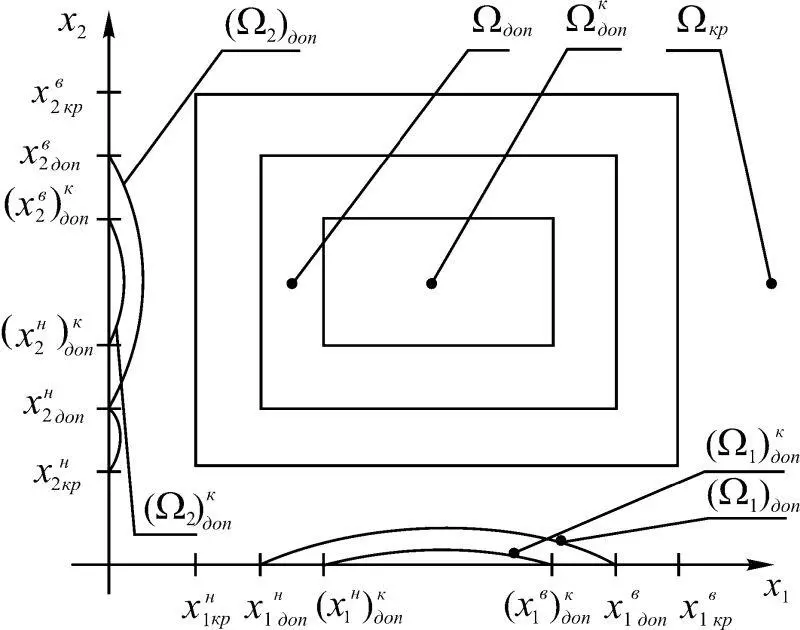
Рис. 1.34
Будем говорить, что риск динамической системы равен нулю, если ее параметры х постоянно находятся в области допустимого состояния, и записывать х Ω доп . Движение на границе области Ω доп или вблизи ее иногда является требуемым режимом такой динамической системы, как социально-экономическая. Последствия возникновения нештатного режима, т. е. выхода из области Ω доп , часто называют кризисом или катастрофой. При этом говорят, что динамическая система сменила базис своего состояния. Как правило, динамическая система по завершении переходного процесса переходит из одного установившегося состояния в другое. В связи с тем, что новое состояние в Ω кр не отвечает ее целевому назначению, его необходимо предотвратить. В общем случае область Ω доп и ее граница S доп зависят от следующих управлений-возмущений, действующих, например, на социально-экономическую динамическую систему со стороны внешней среды:
Интервал:
Закладка: