Владимир Живетин - Введение в теорию риска (динамических систем)

- Название:Введение в теорию риска (динамических систем)
- Автор:
- Жанр:
- Издательство:Изд-во Института проблем риска, Информационно-издательский центр «Бон Анца»
- Год:2009
- Город:Москва
- ISBN:978-5-98664-052-5, 978-5-903140-63-3
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Живетин - Введение в теорию риска (динамических систем) краткое содержание
В работе вводятся первичные и вторичные показатель риска как для классических информационно-энергетических систем, так и для суперклассических – интеллектуально-энергетических систем.
Первичные показатели риска характеризуются множеством безопасных состояний, рассчитанных согласно, например, теории устойчивости; вторичные показатели риска представляют собой вероятности выхода динамической системы в область критических состояний с учетом свойств систем контроля и управления.
Полученные результаты позволяют осуществить математическое моделирование прогнозирования и управления рисками различных динамических систем, включая интеллектуально-энергетические.
Введение в теорию риска (динамических систем) - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
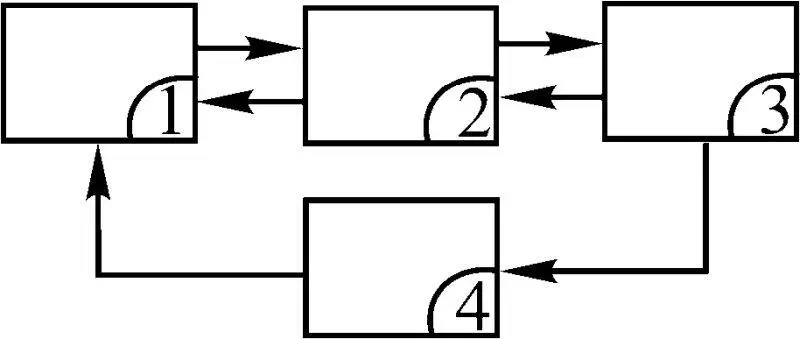
Рис. 1.26
Рассмотрим, в каком виде, какая информация нужна каждой подсистеме структуры, чтобы подсистемы могли реализовывать необходимые алгоритмы обработки статистических данных.
Сначала перечислим функциональные свойства подсистем .
Подсистема 1 порождает структуру системы в целом, способную идентифицировать процессы достижения цели (целеполагание), т. е. реализует синтез.
Подсистема 2 выполняет параметрический анализ, отражающие точностные характеристики.
Подсистема 3 реализует смешанные алгоритмы, синтез и анализ.
Подсистема 4 проводит оценивание законов, функций и плотностей вероятностей.
Процесс оценивания в подсистеме 4 непосредственно связан с величиной показателей достоверности знаний, основанных на:
– синтезе и идентификации;
– теории анализа внутренних компонент;
– формировании прикладных методов;
– оценке результатов.
Отметим, что идентификация структуры динамических систем возможна с использованием структуры выходных процессов динамической системы, так, например, с помощью моментных характеристик.
В подсистеме 1 (рис. 1.26) формируется показатель качества алгоритма, устанавливающего связь между функциональными свойствами подсистем структуры и выходным процессом системы. При этом показатель качества есть некоторая характеристика, определяющая соответствие алгоритма его назначению, оценивающая пригодность алгоритма для решения поставленной задачи и достижения искомой цели. Так, для оценки вероятностной характеристики в данный момент времени достаточно FN- диаграммы, а для прогнозирования той же характеристики необходима как минимум корреляционная функция процесса. При этом показатель качества, как правило, отражает одну из сторон функционирования и область применения алгоритма.
В основу построения математической модели, порождающей стохастические процессы, положим вероятностное пространство, сформированное согласно аксиоматическому методу – системе аксиом Колмогорова. Воспользуемся вероятностной моделью испытаний на базе системы аксиом со структурой [44].
При этом вероятностное пространство характеризуется набором математических объектов (Ω,  , P ), где Ω – пространство исходов или пространство элементарных событий, множества А из – события, а P ( A ) – вероятность события А.
, P ), где Ω – пространство исходов или пространство элементарных событий, множества А из – события, а P ( A ) – вероятность события А.
Базовой основой аксиоматической теории вероятностей служат теория множеств и теория меры. Структура построенных нами вероятностных пространств должна исчерпывать структуру процессов и полей, порожденных динамической системой, для исследования которых создано пространство. Наиболее трудный этап – установление связи между структурой процессов и структурой моделей самой динамической системы, сформировавшими эти процессы.
При построении стохастических математических моделей для математического описания физических объектов используются два принципа [44]:
– аксиоматический А.Н. Колмогорова A* 1, априори вводимых моделей;
– статистический фон Мизеса A* 2, апостериори вводимых моделей.
Подход A* 1имеет в основе макромир, идет от него к микромиру методом дедукции; подход A* 2имеет в основе микромир, идет от него к макромиру (методом индукции).
Эти подходы могут соединиться через структуру макромира, содержащую подсистемы микромира. Объединить эти два подхода может единая структура математической модели динамических систем. При этом A* 1идет сверху вниз, а A* 2 – снизу вверх при изучении одной и той же динамической системы. Часто их пути расходятся: изучая одну и ту же динамическую систему, они приходят к различным конечным структурам моделей динамических систем.
Согласно сказанному, рассмотрим вероятностную модель, вероятностное пространство эксперимента с конечным пространством исходов. В результате изучения подхода, созданного Колмогоровым, получена система и осуществлен структурно-функциональный синтез вероятностной модели Колмогорова, представленный на рис. 1.27.

Рис. 1.27
На рис. 1.27 обозначено: ω – исходы динамической системы; Ω(ω) – множество исходов; М 0 – модель изучаемой динамической модели (фактическая модель); M * 0 – модель М на множестве исходов; M* 1 – модель М на алгебре подмножеств; M 1 – модель, созданная в результате синтеза и анализа множества Ω(ω), в результате чего мы ввели меру Р или в общем случае (Ω, А, Р ), т. е. создали искомую модель М 1.
С целью анализа статистического подхода, созданного фон Мизесом, на рис. 1.28 схематично представлена взаимосвязь и различие на структурно-функциональном уровне рассматриваемых принципов построения математических моделей. Здесь случайные внешние факторы обозначены как W, W 1, W 2.

Рис. 1.28
Исходная ситуация в подходе Колмогорова обусловлена наличием структуры Σ, а функциональные свойства Ф ст получены по материалам статистических испытаний. Исходная ситуация в подходе фон Мизеса обусловлена отсутствием структуры Σ, а функциональные свойства Φ получены по материалам статистических испытаний (Σ ст , Ф ст ).
В качестве меры отличия моделей M 0, M 1, M 2принимается отличие свойств созданных ими множеств, так, например, дисперсии погрешностей, обусловленных величинами Δ 1= | x 0– x 1| и Δ 2= | x 0– x 2|, где x 0, x 1, x 2 – случайные величины, порожденные соответственно моделями M 0, M 1, M 2.
1.6. Вероятностные показатели рисков и безопасности
1.6.1. Области допустимых состояний
В общем случае в процессе функционирования динамических систем измерению и ограничению подлежат многомерные процессы. В дальнейшем ограничимся рассмотрением одномерного и двумерного процессов. В этом разделе мы рассмотрим несколько моделей процессов контроля индикаторов х ( t ) состояния как динамической системы, имеющих односторонние и двусторонние ограничения. При одностороннем ограничении возможны следующие ситуации.
1. Простейшая ситуация.
Ограничиваемый процесс х ( t ) – одномерный, ограничения односторонние, в нашем примере – по минимуму (рис. 1.29), значение х 1 доп вычислено в системе контроля точно, без ошибок, ошибки измерения δ х = х ф – х изм равны нулю, т. е. х изм = х ф ; динамикой процесса х ( t ) и ошибками управлений можно пренебречь. При этих условиях критическое значение х , т. е. х кр , совпадает с х 1 доп . Такую ситуацию и модель (систему) будем считать идеальной.
Читать дальшеИнтервал:
Закладка: