Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании

- Название:Maple 9.5/10 в математике, физике и образовании
- Автор:
- Жанр:
- Издательство:СОЛОН-Пресс
- Год:2006
- Город:Москва
- ISBN:5-98003-258-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании краткое содержание
Книга является справочником и руководством пользователя по новейшим системам символьной (аналитической) математики — Maple 9.5 и Maple 10. Это признанные мировые лидеры в области аналитических вычислений, прошедшие серьезную сертификацию в этой области. Кратко описан интерфейс систем и подробно их обширные возможности в математике, физике и образовании. Особое внимание уделено технике практических вычислений и визуализации их результатов, а также решению дифференциальных уравнений различного типа. Описаны средства символьных и численных вычислений, графические и программные возможности систем, пакеты их расширения, маплеты и практика применения Maple в математических и физических расчетах. Прилагаемый CD-ROM содержит более 340 файлов с примерами вычислений. Для научно-технических работников, студентов и преподавателей университетов и вузов.
Maple 9.5/10 в математике, физике и образовании - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
• LPSolve — линейное программирование;
• LSSolve — улучшенная реализация метода наименьших квадратов;
• QPSolve — квадратичное программирование;
• NLPSolve — нелинейное программирование.
Функция ImportMPC обеспечивает ввод данных для оптимизации из файла, а функций Interactive позволяет работать с интерактивным Maplet-окном для оптимизации.
С пакетом Optimization можно познакомиться по его справке. В ее разделе Examples есть довольно обширный документ с примерами применения пакета — дополнительными к тем, которые даются к функциям пакета в справке. Начало этого документа представлено на рис. 6.3. В нем представлены основные задачи, решаемые пакетом Optimization — линейное, квадратичное и нелинейное программирование, а также приближение данных и функциональных зависимостей методом наименьших квадратов (нелинейная регрессия).
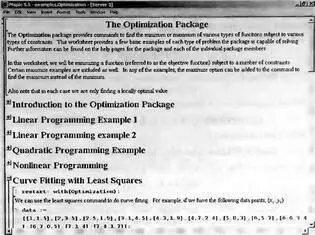
Рис. 6.3. Начало документа с примерами применения пакета Optimization
6.6.2. Работа с функциями Minimize и Maximize
Функции Minimize и Maximize служат для поиска минимумов и максимумов математических выражений с учетом ограничений самыми современными численными методами. Функции записываются в виде:
Minimize(obj [, constr, bd, opts])
Minimize(opfobj [, ineqcon, eqcon, opfbd, opts])
Maximize(obj [, constr, bd, opts])
Maximize(opfobj [, ineqcon, eqcon, opfbd, opts])
Параметры функций следующие:
• obj — алгебраический объект, целевая функция;
• constr — список с ограничивающими условиями;
• bd — последовательность вида name=range, задающая границы для одной или более переменных;
• opts — равенство или равенства вида option=value, где option одна из опции feasibilitytolerance, infinitebound, initialpoint, iterationlimit или optimalitytolerance, специфицированных в команде Minimize или Maximize.
• opfobj — процедура, целевая функция;
• ineqcon — множество или список процедур с ограничениями типа неравенств;
• eqcon — множество или список процедур с ограничениями типа равенств;
• opfbd — последовательность пределов; границы для всех переменных; Примеры применения этих функций представлены ниже:
> Maximize(sin(х)/х);
> Minimize(х^2+у^2);
> Minimize(sin(х)/х, initialpoint={x=5});
> Maximize(sin(x*y*z));
> Minimize(2*х+3*y, {3*х-y<=9, х+y>=2}, assume=nonnegative);
Из этих примеров видно, что результаты вычислений представляются в виде чисел с плавающей точкой с так называемой двойной точностью (правильнее было бы сказать с двойной длиной или разрядностью). При вычислениях используются алгоритмы группы NAG и решатели, описанные ниже.
6.6.3. Линейное программирование — LPSolve
Для решения задач линейного программирования в пакете Optimization введена функция:
LPSolve(obj [, constr, bd, opts])
Она имеет следующие параметры:
• obj — алгебраическое выражений, целевая функция;
• constr — множество или список линейных ограничений;
• bd — последовательность вида name=range, задающая границы одной или многих переменных;
• opts — равенство или равенства в форме option=value, где option одна из опций assume, feasibilitytolerance, infinitebound, initialpoint, iterationlimit или maximize, специализированных для команды LPSolve.
Пример на решение задачи линейного программирования дан на рис. 6.4. Здесь оптимизируется целевая функция -3x-2у, которая линейно зависит от переменных х и у. В этом примере интересна техника графической визуализации решения.
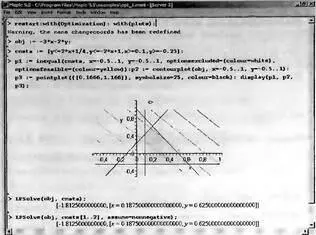
Рис. 6.4. Пример решения задачи линейного программирования
Эта функция может задаваться также в матричной форме:
LPSolve(c [, lc, bd, opts])
Здесь с вектор, задающий целевую функция, остальные параметры были определены выше. Пример применения функции LPSolve в матричном виде представлен ниже:
> с := Vector([-1,4,-2], datatype=float):
bl := Vector([2,3,1], datatype=float):
bu := Vector([5,8,2.5], datatype=float):
LPSolve(с, [], [bl, bu]);
┌ ┌ ┐┐
│ │ 5. ││
│ │ ││
│2.,│ 3. ││
│ │ ││
│ │ ││
└ └2.50000000000000000┘┘
Ряд других подобных примеров применения функции LPSolve можно найти в справке по этой функции.
6.6.4. Квадратичное программирование — QPSolve
Для реализации квадратичного программирования служит функция
QPSolve(obj, constr, bd, opts)
С параметрами, описанными выше для функции LPSolve. Пример реализации квадратичного программирования представлен на рис. 6.5. Здесь оптимизируется выражение -3х²-2y², которое квадратично зависит от переменных x и у. Здесь также интересна техника визуализации квадратичного программирования.

Рис. 6.5. Пример квадратичного программирования
Эта функция также может быть записана в матричной форме:
QPSolve(obj, lc, bd, opts)
Пример применения этой функции дан ниже:
> с := Vector([2, 5.1 , datatype=float):
H := Matrix([[6, 3], [3, 4]], datatype=float):
A := Matrix([[-1,1]], datatype=float):
b := Vector([-2], datatype=float): QPSolve([с, H], [A, b]);
┌ ┌0.46666666666666564┐┐
│-3.5333333333333,│ ││
│ │-1.6000000000000030││
└ └ ┘┘
Ряд подобных примеров можно найти в справке по данной функции.
6.6.5. Нелинейное программирование — NLPSolve
Нелинейное программирование позволяет решать задачи оптимизации при нелинейных зависимостях целевой функции от ее аргументов. Для этого в пакете Optimization имеется функция:
NLPSolve(obj, constr, bd, opts)
NLPSolve(opfobj, ineqcon, eqcon, opfbd, opts)
Ее параметры те же, что и у ранее описанных функций. В связи с этим ограничимся парой примеров ее применения при целевых функциях одной и двух переменных:
> NLESolve(х*ехр(-х), х=0..6, maximize);
> NLPSolve(х*y*ехр(-х)*ехр(-y), х=0..6, y=0..6,maximize);
В оптимизируемых функциях этих примеров присутствует экспоненциальная зависимость, что и указывает на решение задачи нелинейного программирования. Однако следует отметить, что ограничения должны быть линейными — в противном случае возвращается сообщение об ошибке с указанием на необходимость обеспечения линейности ограничивающих условий.
Читать дальшеИнтервал:
Закладка: