Владимир Живетин - Системы аэромеханического контроля критических состояний

- Название:Системы аэромеханического контроля критических состояний
- Автор:
- Жанр:
- Издательство:Институт проблем риска, ООО Информационно-издательский центр «Бон Анца»
- Год:2010
- Город:Москва
- ISBN:978-5-98664-060-0, 978-5-903140-40-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Живетин - Системы аэромеханического контроля критических состояний краткое содержание
Монография предназначена для специалистов в области контроля и управления самолетом.
Системы аэромеханического контроля критических состояний - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Из всех динамических систем, созданных и эксплуатируемых человеком, наиболее сложной является самолет. Проблема риска и безопасности для этого класса динамических систем была и остается наиболее актуальной. Аэродинамические системы, включающие: крыло, горизонтальное и вертикальное оперения, руль высоты, руль направления, элероны, закрылки, предкрылки, обладают определенной для этого класса динамических систем структурой, приведенной на рис. 1.5. На рис. 1.5 приведены следующие обозначения:
L p , m p – расчетные дальность полета и масса самолета;
L ф , m ф – фактические дальность полета и масса самолета соответственно;
L изм , m изм – измеренные дальность полета и масса самолета;
ρ – плотность воздуха;
W x , W y , W z – проекции вектора скорости ветра на оси, связанной с самолетной системой координат.
На рис. 1.5 представлена структура аэродинамической системы на макроуровне. Каждая из четырех подсистем (1–4), включенных в структуру, включает системы на микроуровне, функциональные свойства которых необходимо контролировать и поддерживать на заданном уровне. В противном случае происходит потеря функциональных свойств, и в итоге динамическая система не способна выполнять поставленную цель.
Особая роль принадлежит подсистеме 2 реализации цели, включающей конструкции несущих поверхностей. Конструкция несущих поверхностей выполняет одну из основных компонент реализации цели – создает поле сил аэродинамического давления, обеспечивая целевое перемещение самолета в пространстве. При этом конструкция, двигатель и бортовое оборудование обладают необходимыми свойствами.
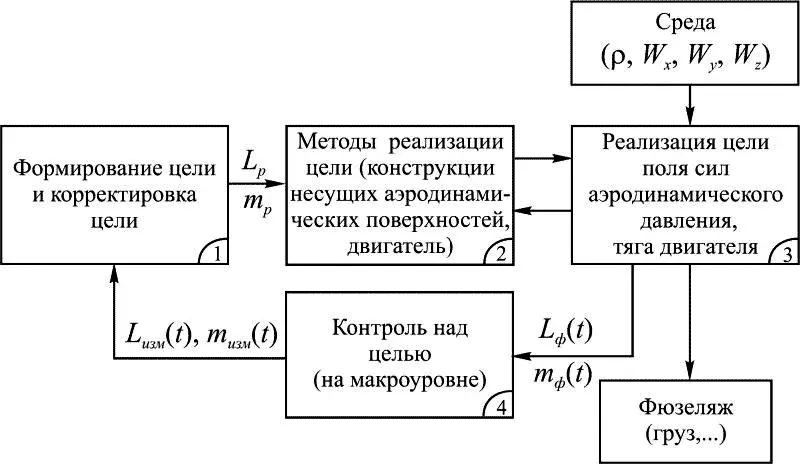
Рис. 1.5
Создав ПСАД, конструкция самолета воспринимает необходимые для реализации целевого перемещения самолета силы и моменты. Особенности конструкции несущих поверхностей отвечают особенностям целевого назначения данного самолета. В свою очередь особенности конструкции порождают особенности структуры поля сил аэродинамического давления, переменного во времени и в пространстве. Взаимодействие конструктивных характеристик и создание ими в полете характеристик ПСАД обусловливают необходимость управлять и ограничивать аэродинамические силы и моменты, следовательно управлять ПСАД.
Рассмотрим роль и место ПСАД на качественном структурно-функциональном уровне в системе аэромеханического контроля и управления векторами аэродинамических сил R = ( X, Y, Z ) и моментом M = ( M x , M y , M z ), где X, Y, Z – проекции вектора аэродинамической силы на связанные с самолетом оси координат; M x , M y , M z – проекции вектора аэродинамического момента на связанные с самолетом оси координат.
На рис. 1.6 представлена структура физической модели процессов образования, контроля и управления полем сил аэродинамического давления с целью реализации заданной траектории движения. Отметим, что для управления полетом (движением) самолета необходимо знать результирующие аэродинамические силы и моменты, которые реализуются в процессе силового взаимодействия воздушной среды и самолета при разных скоростях и направлениях его движения.
В полете для управления, т. е. формирования потребных величин R и М и соответствующих им фактических параметров траектории движения x ф = ( x 1,…, x n ) ф , производится контроль фактических значений R ф и М ф и сравнение их с теоретическими (потребными) значениями R Т и М Т . При этом нам необходима информация о процессах х ф , посредством которой формируются потребные углы отклонения органов управления с целью компенсации отклонения R ф , М ф от R Т , М Т . С помощью современных средств возможно измерение x* ( t ) = x изм = х ф + δ x *, где δ х* – погрешности измерения х *. При этом достоверный контроль x ( t ) с помощью современных средств возможен только в горизонтальном установившемся полете, когда x ≈ x *.
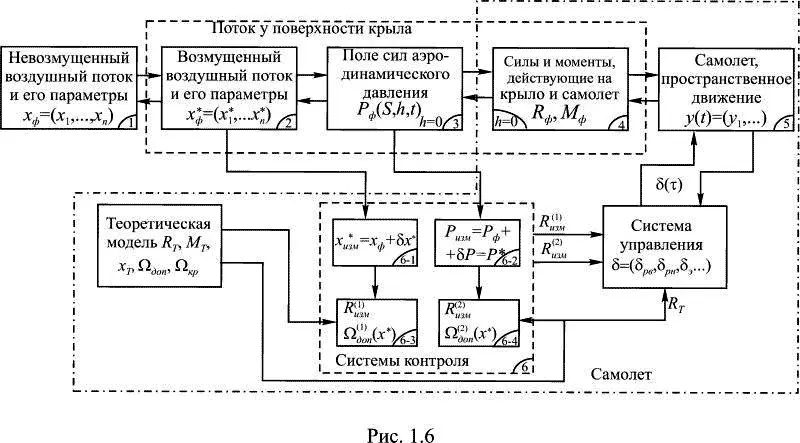
Рис. 1.6
Чем дальше мы уходим от установившегося горизонтального полета, тем больше возникает отличие х * от х , тем больше имеют место погрешности в оценке аэродинамических сил R и моментов М .
На рис. 1.6 имеют место следующие соотношения:
1) измеренные значения аэродинамических сил:
R (1) изм = R ф + δ R м + δ R и ; R (2) изм = R ф + δ R и ,
где δ R м , δ R и – погрешности измерения R методические и инструментальные соответственно;
2) фактические значения аэродинамических сил и моментов:
R и = R т + δ R* м; М ф = М т + δ М* м ,
где δ R м , δ М* м – методические погрешности, обусловленные несоответствием методов и средств идентификации R и М в полете;
3) x = (α,β, V в ,…) = ( x 1, x 2, x 3,…);
4) y ( t ) = ( H g,X g , Y g , Z g ,ω х ,ω y ,ω z ,…) = ( у 1, у 2, у 3,…),
где H g , Χ g , Y g , Ζ g – высота полета и проекции положения координаты центра тяжести самолета на земные оси координат OX д , OY д , OZ д соответственно; ω x , ω y , ω z – угловые скорости вращения самолета относительно осей OX, OY, OZ связанной системы координат;
5)  ,
,
где Δ x (·) – отклонение параметров возмущенного потока х * от параметров невозмущенного потока х; h – расстояние от несущих поверхностей самолета, измеренное, например, по нормали; S – точка на несущей поверхности самолета;
6) Ω доп ( x ) = Ω доп ( x *) + δΩ доп ,
так, например, для угла атаки получим α доп ( x ) = α доп ( x* ) + δα;
7) Ω кр ( x ) = Ω кр ( x *) + δΩ кр .
При этом, начиная с некоторого расстояния h от несущих поверхностей, параметры потока получают возмущение, и при приближении к несущим поверхностям они увеличиваются, максимальная величина их достигается на поверхности, например, крыла. Таким образом, в системе аэромеханического контроля решается обратная задача – аэродинамическая. Здесь задано поле аэродинамического давления P ( S,h,t ), его величина в ограниченном числе точек на поверхности S; требуется определить параметры х невозмущенного набегающего потока. Отметим, что прямая задача связана с определением поля аэродинамического давления (сил и моментов), если известны параметры невозмущенного потока, в которое погружены несущие аэродинамические поверхности.
Читать дальшеИнтервал:
Закладка: