Владимир Живетин - Введение в теорию риска (динамических систем)

- Название:Введение в теорию риска (динамических систем)
- Автор:
- Жанр:
- Издательство:Изд-во Института проблем риска, Информационно-издательский центр «Бон Анца»
- Год:2009
- Город:Москва
- ISBN:978-5-98664-052-5, 978-5-903140-63-3
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Живетин - Введение в теорию риска (динамических систем) краткое содержание
В работе вводятся первичные и вторичные показатель риска как для классических информационно-энергетических систем, так и для суперклассических – интеллектуально-энергетических систем.
Первичные показатели риска характеризуются множеством безопасных состояний, рассчитанных согласно, например, теории устойчивости; вторичные показатели риска представляют собой вероятности выхода динамической системы в область критических состояний с учетом свойств систем контроля и управления.
Полученные результаты позволяют осуществить математическое моделирование прогнозирования и управления рисками различных динамических систем, включая интеллектуально-энергетические.
Введение в теорию риска (динамических систем) - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Для построения такой модели человечество накопило большое количество подобных процессов-сценариев: Египет, Индия, Китай, Древний Рим, Израиль, Россия [28]. Как показывает анализ структурно-функционального состояния этих цивилизаций, имеют место следующие подсистемы с их наполнением человеческими духовными ресурсами R д [28]:
– подсистема (1) целеполагания R (1) д  5 %,
5 %,
– подсистема (2) целедостижения R (2) д 5 %,
– подсистема (3) целереализации R (3) д 70 %,
– подсистема (4) контроля целесостояния R (4) д 5 %,
– шудра (потерянные ресурсы) R (5) д 15 %.
Ресурсы духовные R ( i ) д  по своему нравственно-интеллектуальному потенциалу не должны уменьшаясь выходить из области допустимых значений Ω ( i ) доп в область критических значений Ω ( i ) кр . В случае если это произошло, процессы целеполагания и целедостижения создают критическую ситуацию в подсистеме целереализации (3). Возникает противостояние целей, методов и средств ее достижения. В итоге наблюдается резкое падение энергетического потенциала, наступает энергетическая смерть.
по своему нравственно-интеллектуальному потенциалу не должны уменьшаясь выходить из области допустимых значений Ω ( i ) доп в область критических значений Ω ( i ) кр . В случае если это произошло, процессы целеполагания и целедостижения создают критическую ситуацию в подсистеме целереализации (3). Возникает противостояние целей, методов и средств ее достижения. В итоге наблюдается резкое падение энергетического потенциала, наступает энергетическая смерть.
Для предотвращения этого необходимо найти способ оценки уровней нравственно-интеллектуального потенциала в подсистемах, выявить уровень допустимых и критических значений, начиная с которых происходит деструктуризация системы. При этом подсистемы есть, но их функциональный потенциал ничтожно мал в силу свойств личностей, их наполняющих, как сейчас в России.
При создании такой модели следует учесть один из важных факторов подобных систем, а именно:
– единство разума , структурно-функциональных свойств различных людей планеты, которое становится очевидным, если рассмотреть их творения [21, с. 72];
– более тонкое творение человечества – единая структура культуры [21, с. 102].
Риски действия
Возникновение опасного состояния динамической системы может быть представлено как последовательность нижеследующих событий. При одностороннем ограничении по минимуму возможны следующие ситуации.
1. Появление события А , обусловленного отклонением х под влиянием W или/и V. В результате такого воздействия отдельные компоненты вектора х (или все в совокупности) покидают область Ω доп и попадают в Ω кр . Событие А обозначим А = { x  Ω кр }. Вероятность события А обозначим Р ( А ) (рис. 1.22).
Ω кр }. Вероятность события А обозначим Р ( А ) (рис. 1.22).
2. Пусть событие А происходит на интервале времени τ большем, чем τ 0, за которое в динамической системе завершаются все переходные процессы, и тогда она не может возвратиться в Ω доп . Таким образом, опасное состояние динамической системы наступает тогда, когда реализуются два события ( А, В ), где В : (τ > τ 0).
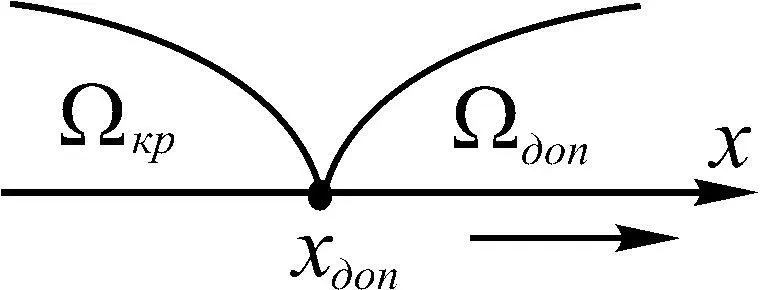
Рис. 1.22
3. Появление события А фиксируется подсистемой контроля или оценки в некоторый момент времени t в виде х o = х изм , представляющем собой событие D : ( x o < x доп ), где x o– оценка текущего (фактического) значения x ф ; x доп – ограничение одностороннее снизу.
4. При появлении события D в процессе принятия решения из-за ошибок, имеющих место в системе контроля, формирующей x o , опасное состояние динамической системы может не аннулироваться, а развиваться, т. е. наступает событие E : ( x ( t ) < x доп , t > τ).
5. Событие А реализуется на отрезке времени [ t 0, T ], на котором все события приняли безвозвратный характер. Это событие обозначим: С : ( x ( t ) < x доп , t [ t 0, T ]).
При этом вероятность P ос перехода динамической системы в опасное состояние записывается так:
P oс = P ( A, B, D, E, C ) = P ( A, B ) · P ( D, E,C / A, B ),
где P ( A, B ) – вероятность появления фактора риска, обусловливающего опасное состояние динамической системы; P ( D, E, C / A,B ) – условная вероятность пребывания динамической системы в критической области.
Представим P ( D, E,C / A, B ) и соответствующие ему ситуации в виде
P ( D, E, C / A, B ) = P ( D, E / A, B ) + P ( C / A, B )
в силу независимости ( D, E ) и ( С ).
Предполагая, что ошибки принятия решения и ошибки оценки, совершаемые динамической системой, есть независимые события, получим
P oс = P ( A, B )[ P ( D / A, B ) + P ( E / A, B ) + P ( C / A, B )].
При этом вероятность P ( D / A, B ) позволяет оценить наши возможности в области оценок (измерений) и допускаемых ошибок, которые влияют на процесс возникновения опасной ситуации.
Вероятность P ( E / A, B ) равна вероятности непарирования критических значений контролируемого параметра из-за ошибок управления.
Вероятность P ( C / A, B ) характеризует численно величину аварийной ситуации (катастрофы).
Таким образом, нижеследующие события характеризуют:
( А, В ) – усложнение функционирования динамической системы;
( А, В, D ) – опасную ситуацию;
( А, В, D, Е ), ( А, В, С ) – катастрофическую ситуацию.
При этом P ос является интегральной характеристикой риска динамической системы.
Исходной информацией при оценке P ос является область допустимых состояний Ω доп . Задача построения P ос включает в себя:
– обоснование совокупности параметров х состояния динамической системы, подлежащих контролю и ограничению;
– разработку математического метода количественного расчета фактических значений параметров х с заданной степенью достоверности;
– разработку методов оценки погрешностей измерения параметров х с заданной степенью достоверности;
– разработку математического метода расчета допустимых значений х , т. е. x доп .
1.4.3. Области состояний динамических систем
Процессу целереализации соответствуют три уровня состояния динамической системы:
– допустимых состояний Ω доп ( х ), при которых динамическая система способна достичь поставленную цель, например, когда θ > 0,  > 0;
> 0;
Интервал:
Закладка: