Ричард Фейнман - 2a. Пространство. Время. Движение

- Название:2a. Пространство. Время. Движение
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Ричард Фейнман - 2a. Пространство. Время. Движение краткое содержание
2a. Пространство. Время. Движение - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Если еще увеличить сопротивление, то колебания затухнут еще быстрее (фиг. 24.5).
Фиг, 24.5. Колебания почти исчезли.
Но если сопротивление увеличить сверх некоторого предела, колебаний мы вообще не увидим. А может быть, нам просто отказывают глаза? Увеличим еще сопротивление и получим тогда кривую, представленную на фиг. 24.6; по ней можно лишь с натяжкой сказать, что в цепи произошли колебания, ну разве что одно.
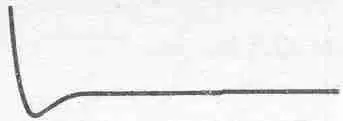
Фиг. 24.6. Колебаний нет.
Можем ли мы математически объяснить это явление?

Сопротивление механического осциллятора, конечно, пропорционально g. В нашем случае g— это R/L. Теперь, если увеличивать g, то в столь приятных нам решениях (24.14) и (24.15) наступает беспорядок; когда g /2 становится больше w 0, решения приходится записывать по-другому:

Это снова два решения, которые приводят нас к решениям exp(ia 1t) и ехр(ia 2t). Подставив теперь a 1, получим
Никаких колебаний. Чисто экспоненциальное убывание. То же самое дает и второе решение

Заметим, что квадратный корень не может превысить g/2; даже если w 0=0, оба члена равны. Если же w 2 0отличается от g/ 2/4, то квадратный корень меньше g//2 и выражение в круглых скобках всегда положительно. Это очень хорошо! Почему? Да потому что если бы это выражение было отрицательным, то е пришлось бы возводить в положительную степень и мы получили бы возрастающее со временем решение. Но при увеличении в цепи сопротивления колебания не могут возрастать, значит, мы избегли противоречия. Итак, мы получили два решения; оба решения экспоненциально затухают, но одно из них стремится «умереть» гораздо скорее. Общее решение, конечно, представляет собой комбинацию обоих решений, а значения коэффициентов А и В зависят от того, как начинаются колебания, каковы начальные условия. В нашей цепи случилось так, что А — отрицательное число, а В — положительное, поэтому на экране осциллоскопа мы увидели разность двух экспонент.
Давайте обсудим, как найти коэффициенты А и В (или А и A*), если известны начальные условия. Предположим, что в момент t=0 нам известны смещение х=х 0 и скорость dx/dt=v 0 . Если в соотношения

подставить значения t=0, х=х 0 , dx/dt=v 0 и воспользоваться тем, что е 0=е i 0=1, то мы получим

x 0 =A+A*=2A R ,
Значит,

Таким образом, зная начальные условия, мы полностью определили А и А*, а значит, и кривую переходного решения. Можно записать решение и по-другому. Вспомним, что

e i q+e - i q=2cosq и e i q - e - i q =2isin q , тогда
где wg=+Ц(w 2 0-(g 2/4). Мы получили формулу затухающих колебаний. Такая формула нам не понадобится, однако отметим ее особенности, справедливые и в более общих случаях.
Прежде всего поведение системы, на которую не действует внешняя сила, описывается суммой (суперпозицией) временных экспонент [мы записали их в виде exp(iat)]. Такое решение хорошо передает истинное положение вещей. В общем случае a — это комплексное число, и его мнимая часть соответствует затуханию колебаний. Наконец, тесная математическая связь синусоидальных и экспоненциальных функций, о которой говорилось в гл. 22, физически часто проявляется в переходе от колебаний к чисто экспоненциальному затуханию при критических значениях некоторых параметров системы (в нашем случае это было сопротивление g).
Глава 25
ЛИНЕЙНЫЕ СИСТЕМЫ И ОБЗОР
§ 1. Линейные дифференциальные уравнения
§ 2. Суперпозиция решений
§ 3. Колебания в линейных системах
§ 4. Аналогии в физике
§ 5. Последовательные и параллельные сопротивления
§ 1. Линейные дифференциальные уравнения

В этой главе мы снова вернемся к некоторым аспектам наших колебательных систем, только постараемся теперь увидеть нечто более общее, стоящее за спиной каждой частной системы. Изучение каждой колебательной системы сводилось к решению дифференциального уравнения

Эта комбинация «операций» над переменной х обладает интересным свойством: если вместо х подставить (х+у), получится сумма одинаковых операций над х и y, а умножение х на число а сводится к умножению на это число первоначальной комбинации. Это легко доказать. Чтобы не переутомиться, записывая все буквы, вошедшие в (25.1), давайте введем «скорописные» обозначения. Обозначим всю левую часть уравнения (25.1) символом L (х). Увидев такой символ, вы должны мысленно представить себе левую часть уравнения (25.1). Поэтому, согласно этой системе, символ L(x+y) будет означать следующее:
(Подчеркнем букву L, чтобы не спутать этот символ с обычной функцией.) Иногда мы будем употреблять термин операторная запись, но совершенно безразлично, какими словами это называть, просто-напросто это «скоропись». Наше первое утверждение, что
L(x+y)=L(x)+L(y), (25.3)
следует из соотношений а(х+у)=ах+ау, d(x+y)/dt=dx/dt+-dy/dt и т. д.
Легко доказать, что для постоянного а
L(ax)=aL(x). (25.4)
[Соотношения (25.3) и (25.4) тесно связаны одно с другим, потому что, подставив в (25.3) х+х, мы получим (25.4) для частного значения а=2 и т. д.]
Решая более сложные задачи, можно получить L, в котором содержится больше членов и более высокие производные. Обычно первым делом интересуются, справедливы ли соотношения (25.3) и (25.4). Если они выполняются, то задачу называют линейной. В этой главе мы изучим некоторые свойства систем, следующие только из того факта, что система линейная. Это поможет нам понять общность некоторых свойств изученных ранее частных систем.
Читать дальшеИнтервал:
Закладка: